資料來源:
1. https://lemariva.com/blog/2019/09/micropython-how-about-taking-photo-esp32
2. https://github.com/espressif/esptool
3. http://twarm.com/commerce/product_info.php?products_id=1323
硬體:
1. ESP32 CAM
2. MicroUSB傳輸線
3. 雙母頭杜邦線
軟體:
1. MicroPython 燒錄檔,下載連結:https://micropython.org/resources/firmware/esp32-20210623-v1.16.bin
2. esptool.py,一個可以燒錄ESP32CAM的 Free Software ,使用說明及安裝。
3. Thonny ,Python IDE,可進行Python程式設計,也可以直接將程式碼燒錄到ESP32CAM,下載連結:https://thonny.org/
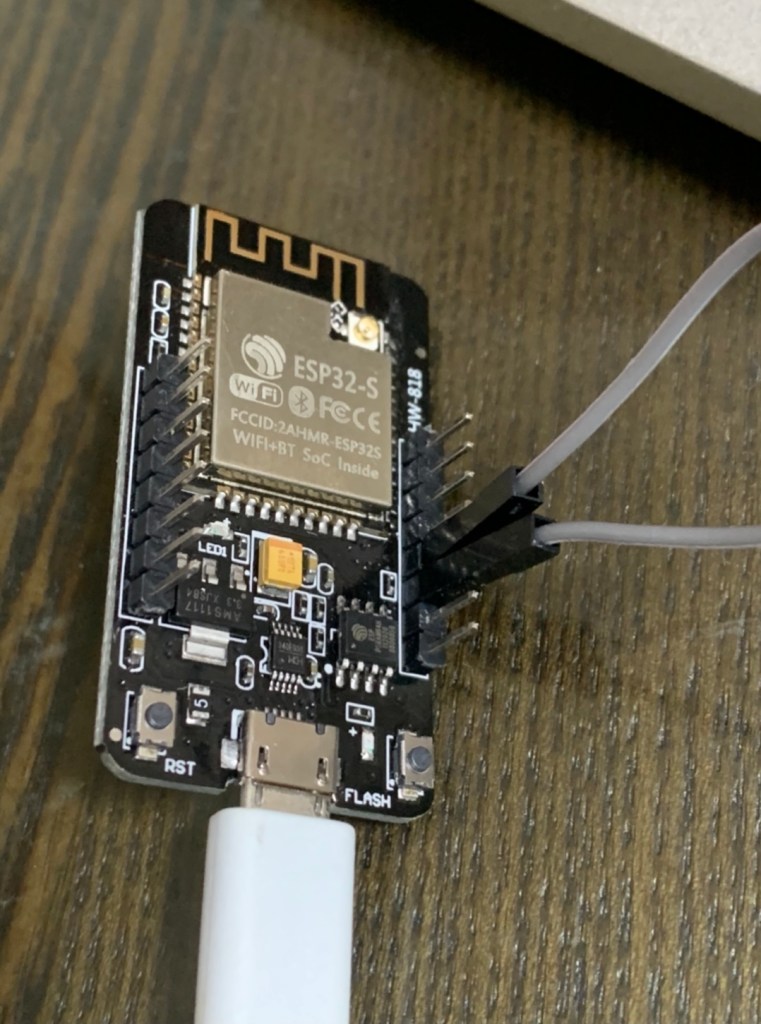
ESP32 CAM(副廠,內建USB-TTL介面),硬體相關資料如資料來源3
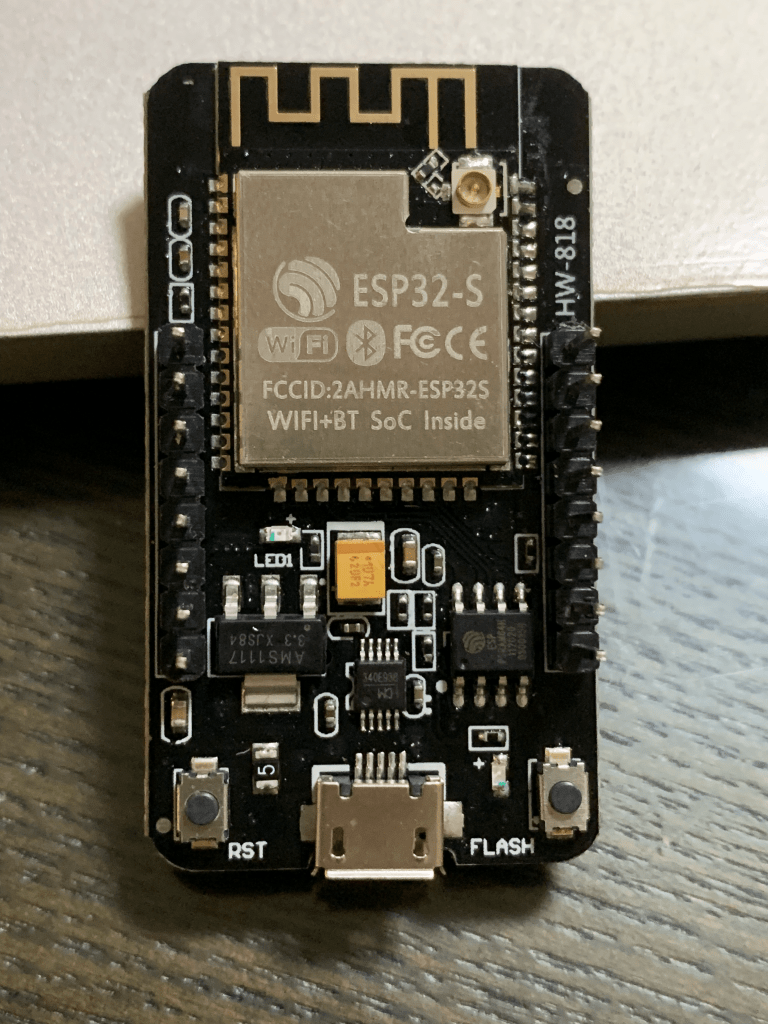
ESP32 CAM 正面(有pin腳) 
ESP32 CAM 背面(無pin腳)
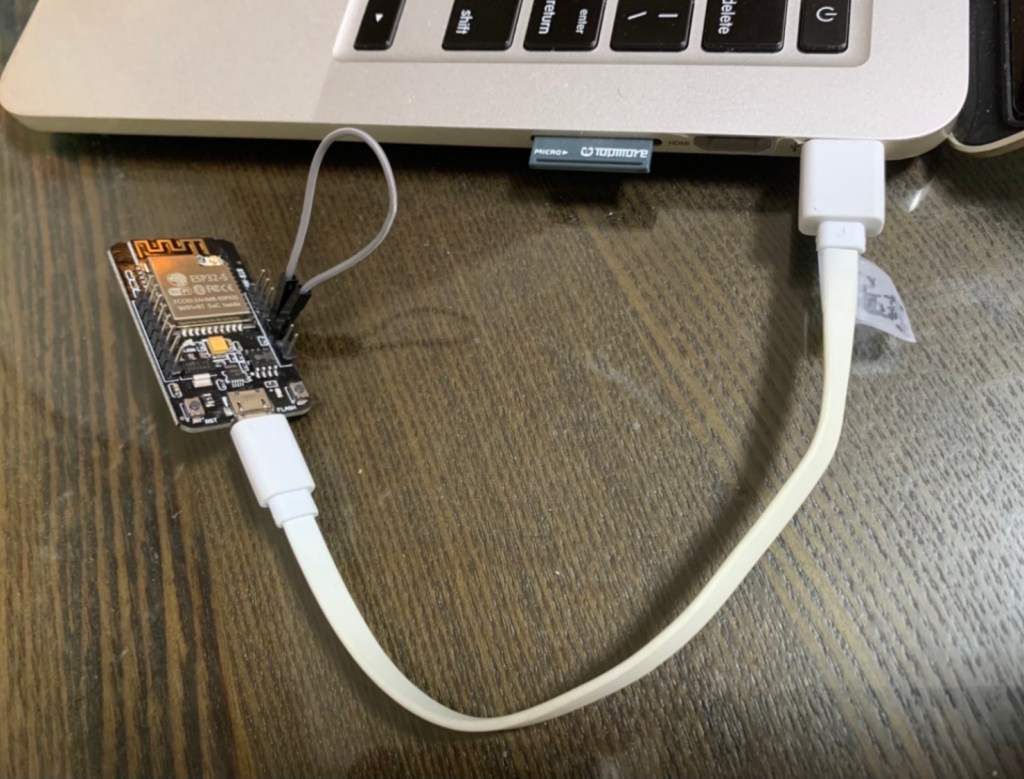
將MicroUSB傳輸線連接到ESP32CAM,並將ESP32CAM的GPIO 0及GND短路,這樣就可以準備燒錄了。
前往放置燒錄檔案bin檔所在位置的目錄,在目錄內點擊右鍵從終端機打開
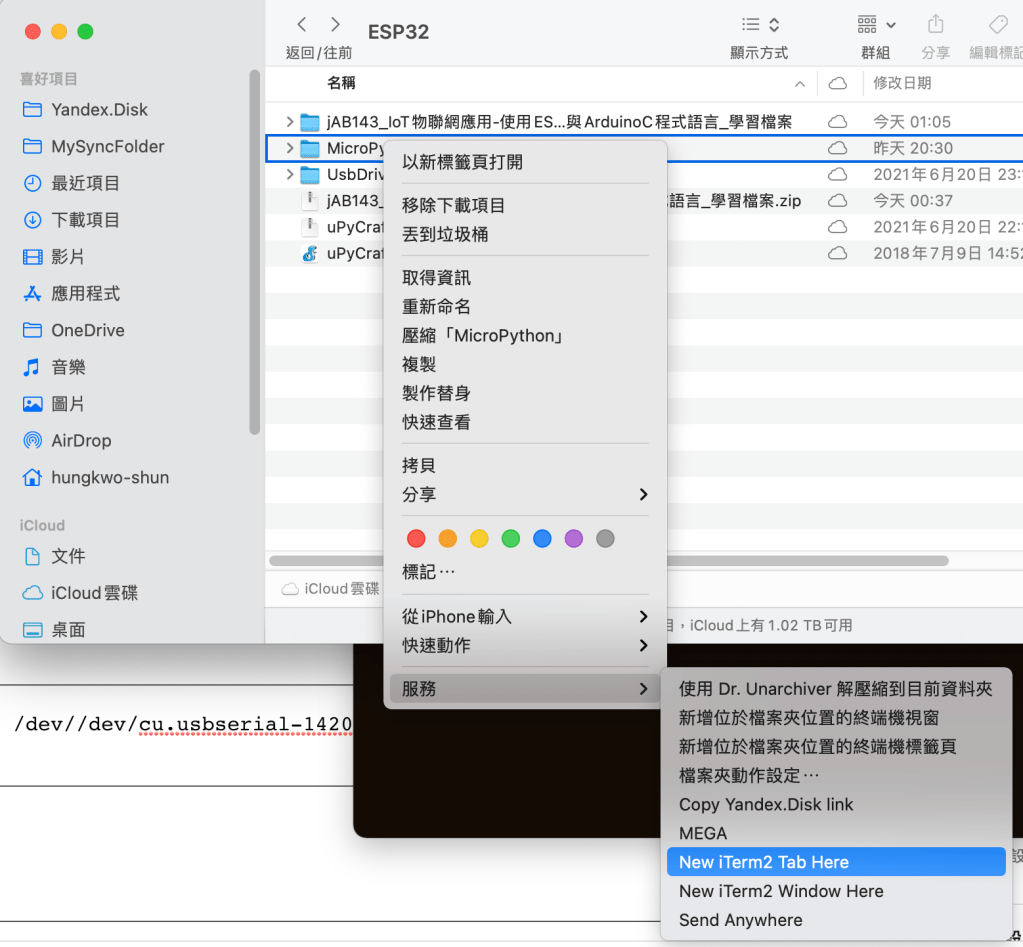
先找出你使用的序列阜,
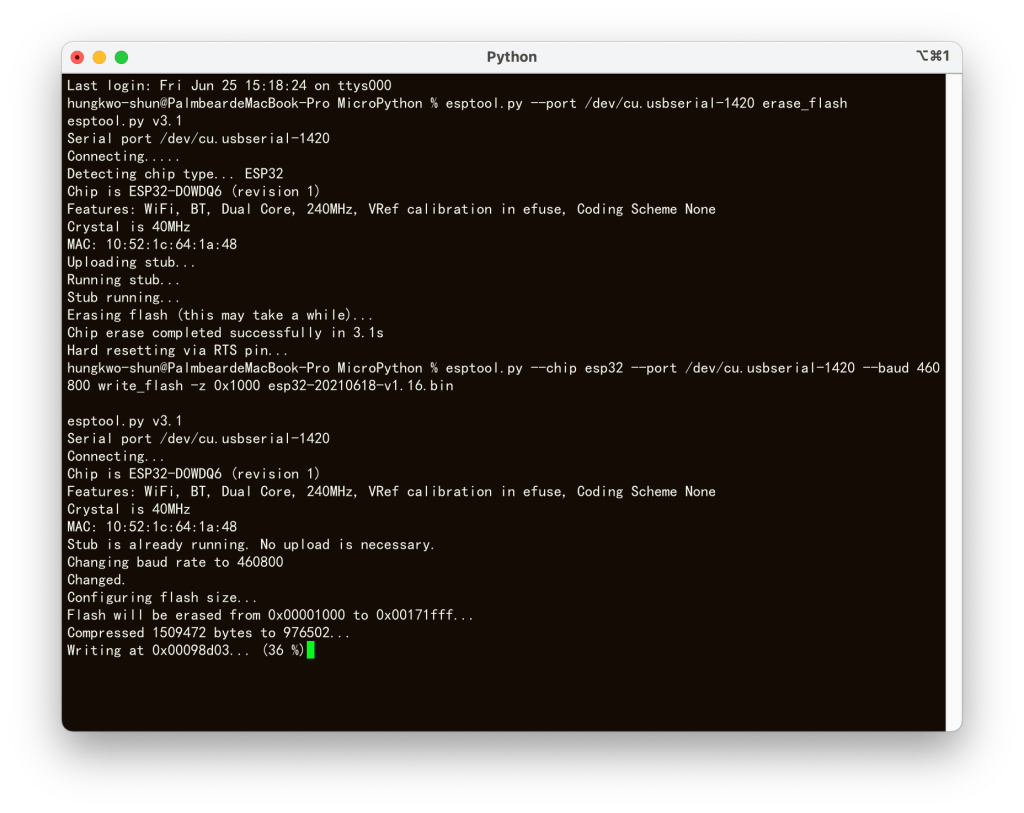
ls -l /dev/cu.*先抹除ESP32 CAM的flash,我們使用esptool.py來燒錄。
如果你的USB TTL 是 CH340 請用這個
esptool.py --port /dev/cu.usbserial-1420 erase_flash
如果是 CP210x 請用下面的
esptool.py --port /dev/cu.SLAB_USBtoUART erase_flash
再寫入ESP32 CAM
#燒錄Micropython
esptool.py --chip esp32 --port /dev/cu.usbserial-1420 --baud 460800 write_flash -z 0x1000 <改成你的檔案(esp32-20210618-v1.16.bin)>
#燒錄Circuitpython
esptool.py --port /dev/cu.SLAB_USBtoUART --baud 460800 write_flash -z 0X1000 adafruit-circuitpython-adafruit_metro_esp32s2-en_US-6.3.0.bin
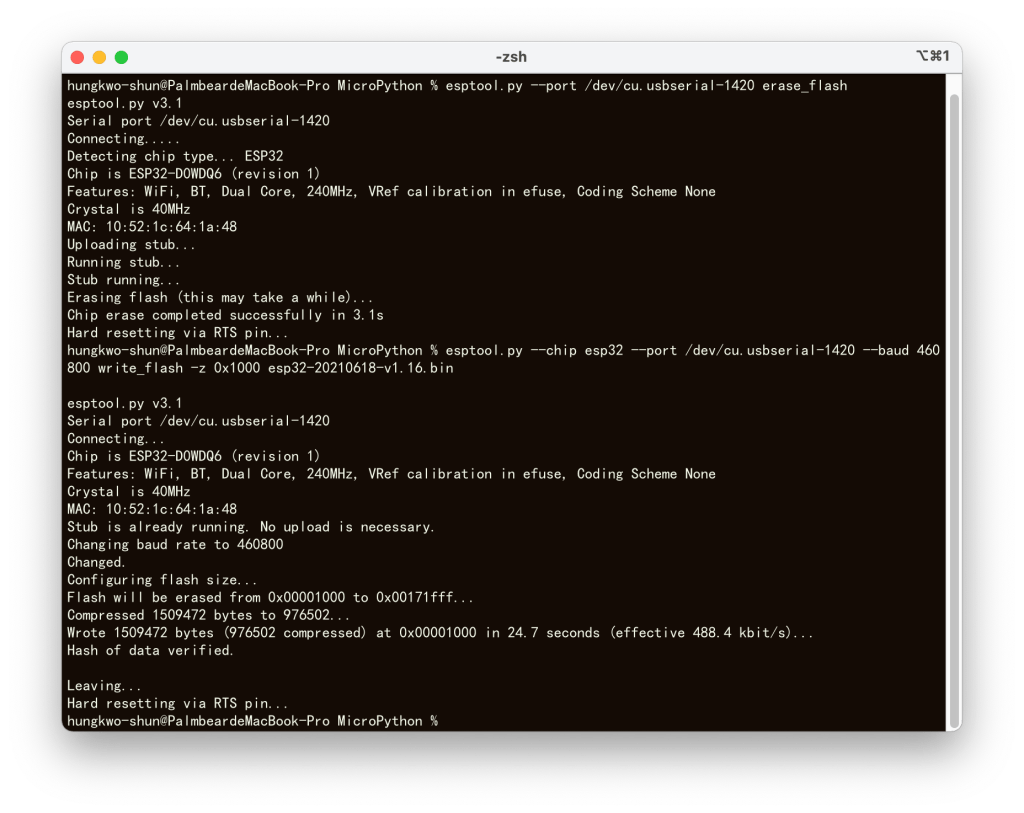
韌體燒錄完畢,拆下GPIO 0及GND之間的短路線材,按下RST鍵,重新啟動ESP32CAM,即可使用 Thonny 來寫程式了。

依照 資料來源3 的硬體資料說明,燒錄要一直按著「Flash」鍵,但是 esptool 燒錄,整個使用過程完全不需要按任何按鍵就完成燒錄了。
安裝 Thonny 完成後,開啟 Thonny 就會看到下面畫面,就代表 Thonny 已經與ESP32CAM完成連接了,並顯示你燒錄的 MicroPython 版本。
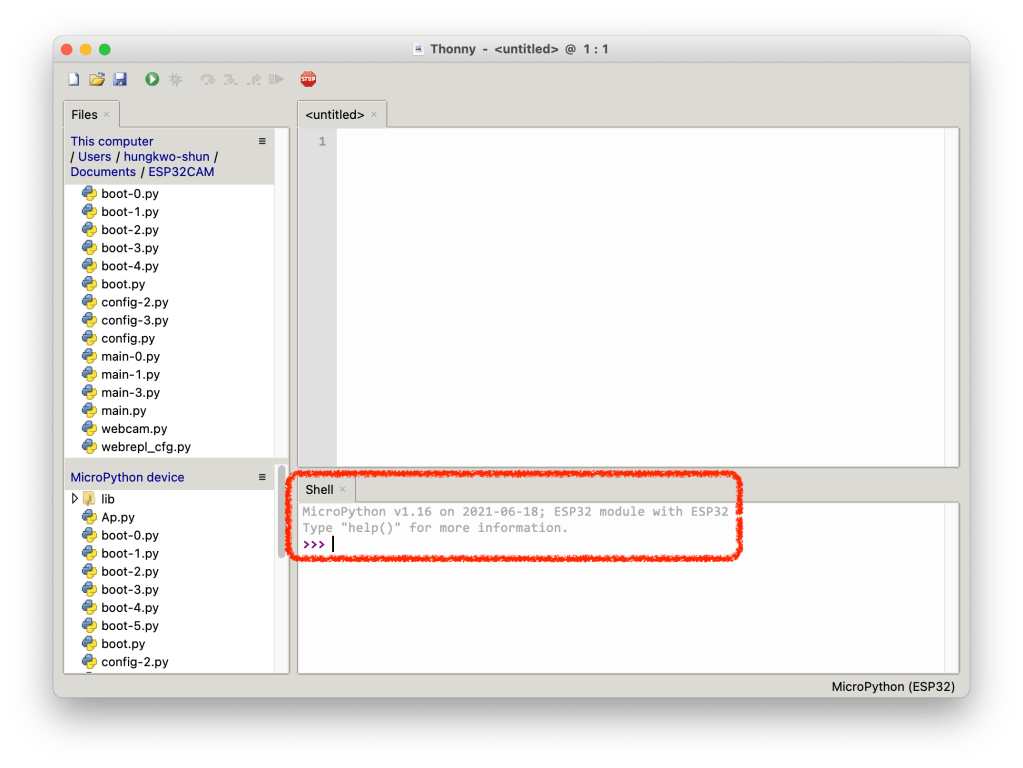
如果沒有出現,起點選上方工具列點選 Run > Select Interpreter ,如下圖:
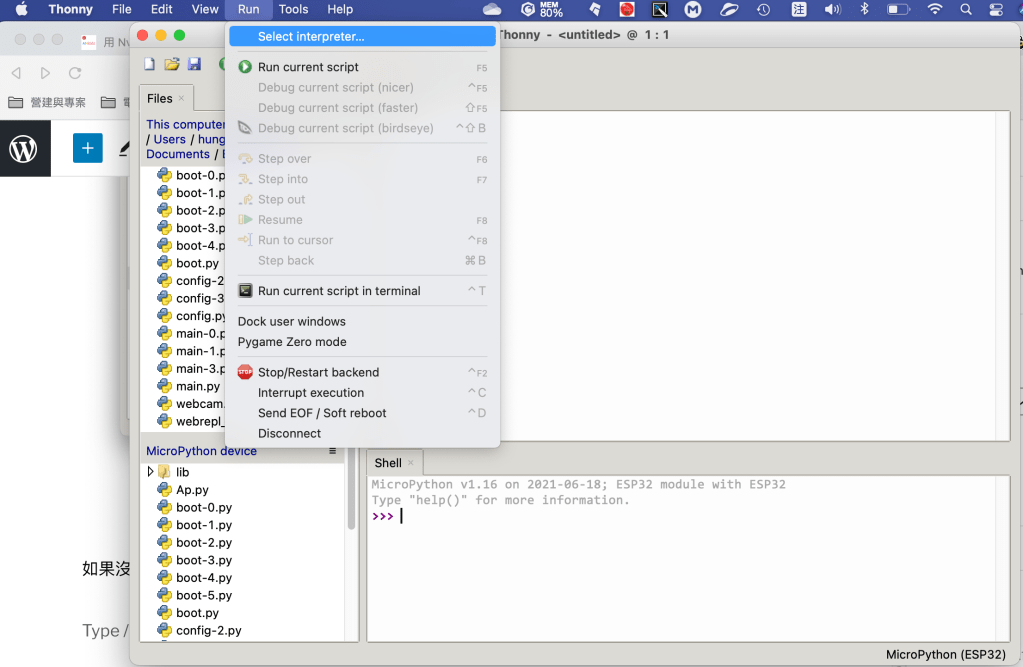
接著會出現下面視窗,選取你要連接的USBserial Port,在按下「OK」鍵,
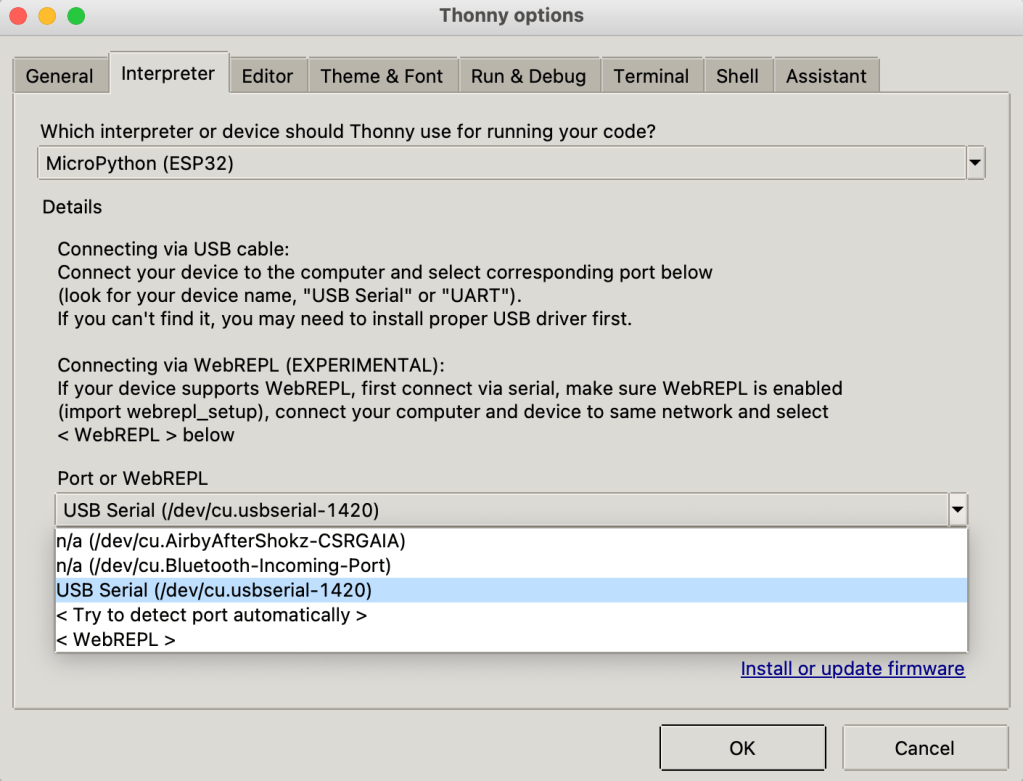
這樣應該就可以連上 ESP32CAM了!